
文章目录
网络连接方式一,无线设置方法1,具有广域网环境的路由器1-1,连接1-2,查看1-3,测试1-4,验证
2,手机热点构成局域网3,无广域网但有路由器下建立局域网
二,有线设置方法1-1,连接1-2,查看1-3,测试1-4,验证
这个教程主要演示了Aubo机械臂与笔记本进行网络连接的两种方式。相比较而言,利用有线连接,机械臂控制会更加柔顺。
网络连接方式
一,无线设置方法
1,具有广域网环境的路由器
当我们拥有路由器且具有广域网连入路由器Wan口的情况下,笔记本电脑的ubuntu端和移动平台的ubuntu端的都连接到szar_robot(路由器散播的局域网下wifi名称,根据自己所处环境进行变更)的无线下。
1-1,连接
首先自己电脑的连接很简单,就是连接到路由器散播的热点就可以。
Aubo_i5在ubuntu下配置连接,网络配置部分在
/usr/share/applications/Network下设置IP地址和笔记本电脑无线连接的网段一致。

1-2,查看
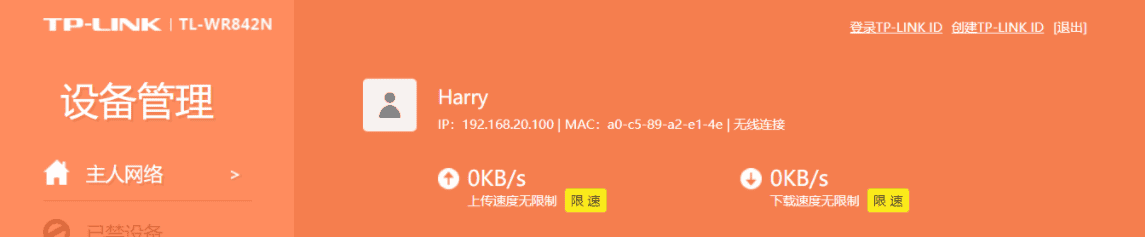
然后进入aubo_i5示教器环境前,可以在上面的图片中,查看连接szar_robot的属性,可以找到机械臂的IP地址。提示,这里的IP地址应该和无线网卡上标的IP地址一致。
查看笔记本电脑的IP地址:
网页端输入:
http://tplogin.cn/
密码输入1234567890
进入后点暂不升级,可以看到笔记本电脑的IP地址是192.168.20.113。

1-3,测试
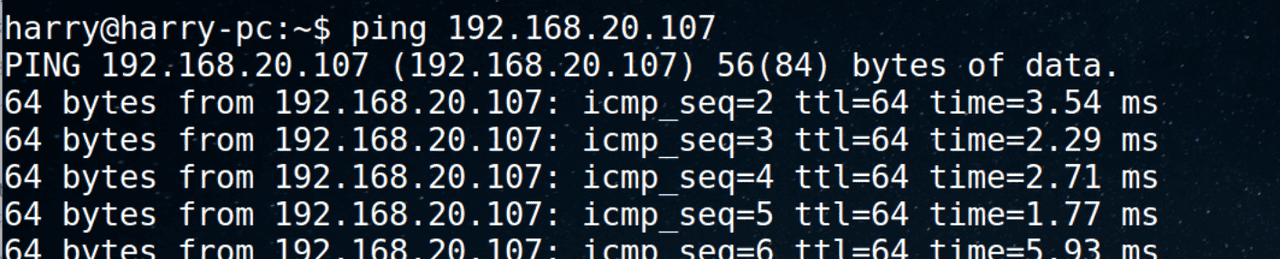
首先在自己笔记本电脑上ping一下,ping示教器下的IP地址,也就是无线网卡下写的IP地址,例如192.168.20.107,可以ping通。
然后在示教器下,找到网络,ping一下自己的笔记本电脑,看看能不能ping通。
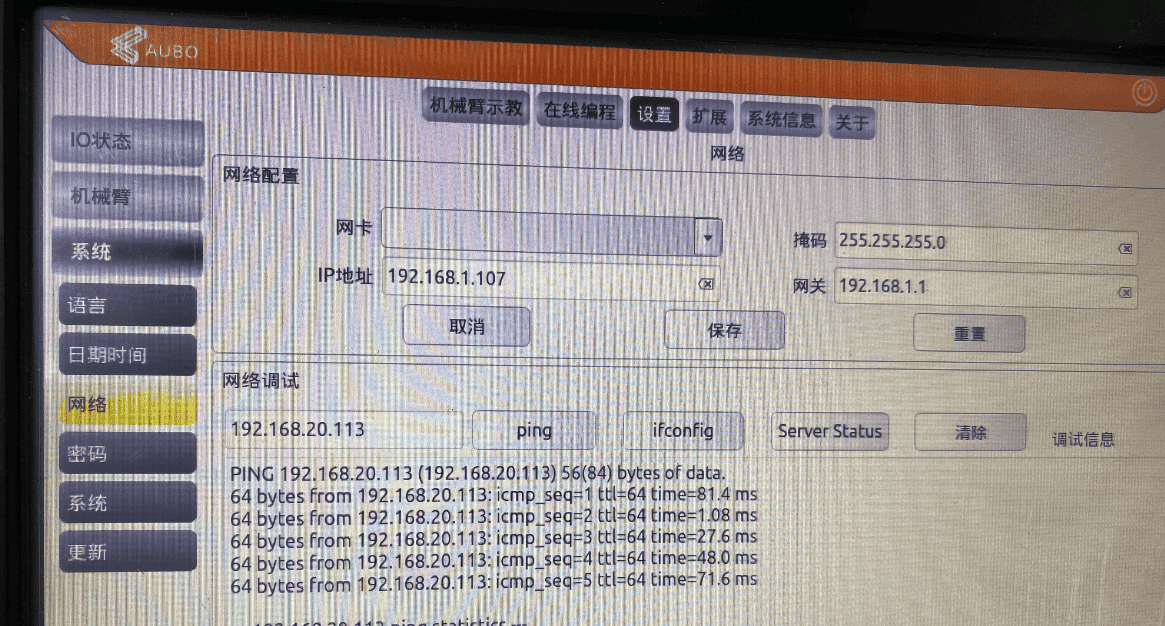
可以ping通的情况下,这样两边就利用无线路由器建立了连接。
1-4,验证
运行:
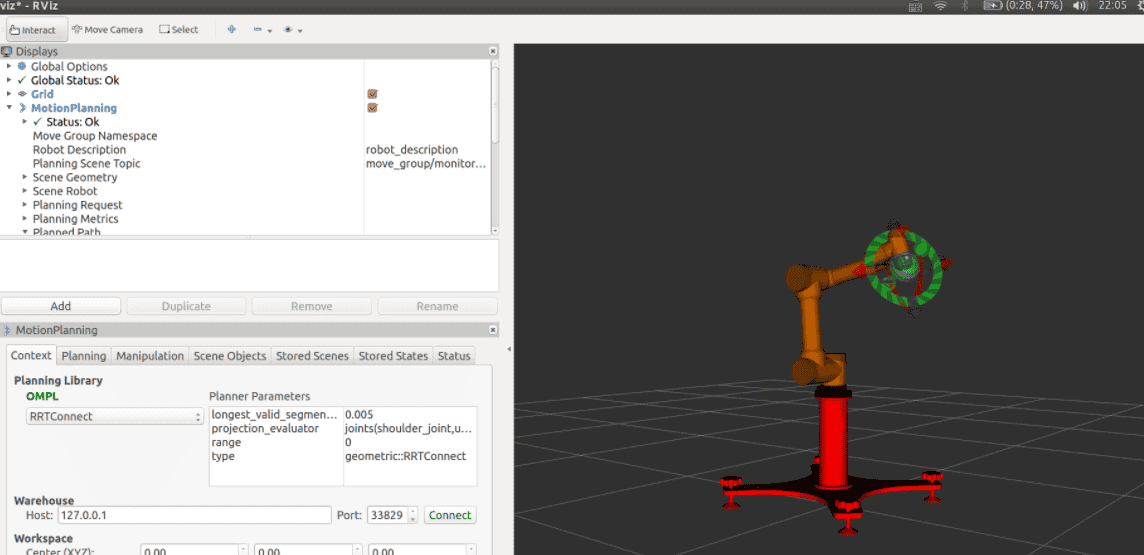
roslaunch aubo_i5_moveit_config moveit_planning_execution.launch sim:=false robot_ip:=192.168.20.107
注意这里的IP地址是机械臂的IP地址。可以看到机械臂的姿态和实际环境中一致。
上面是一种常规的方式,但是如果所在的区域没有这样一个局域网,该怎么办呢?
两种替代方案:
2,手机热点构成局域网
利用手机散播热点,然后两台机器同时连接到手机热点。IP地址,也是通过查看各自连接到热点的属性进行查看。
3,无广域网但有路由器下建立局域网
在有路由器的情况下,但是无广域网与路由器的wan(广域网)进行连接。
首先需要配置一下路由器,散播一个热点,这里的配置参考一下路由器的教程,配置完成后路由器只要上电便会散播一个热点。
然后我们并不需要连接到广域网下,只需要将设备直接连接到热点下就可以。
可以看到本身路由器会自动分配一个IP地址,有些情况下,我们需要修改一下IP地址的网段,那么如何进行修改呢?
这时可以采用,笔记本电脑的网口端连接到路由器的 Lan口(局域网)。
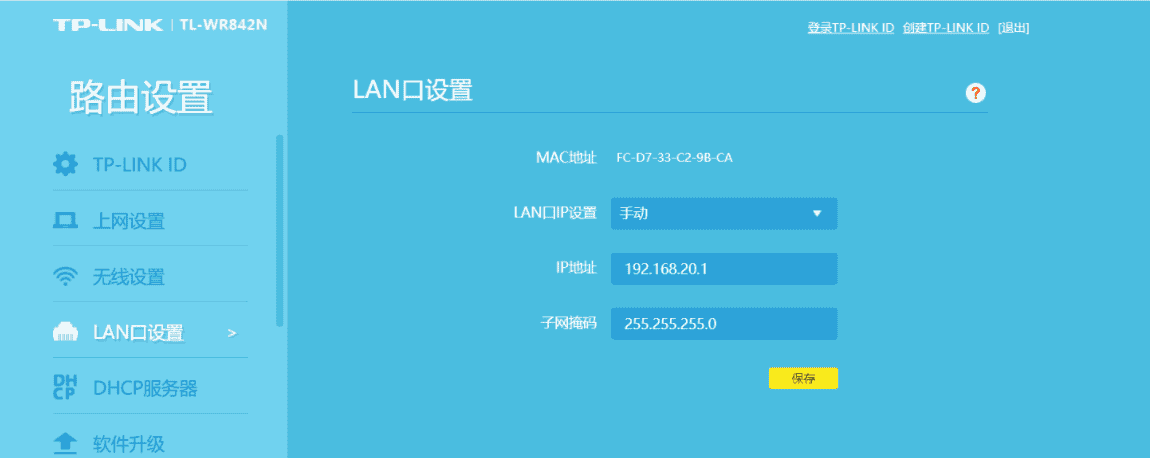
输入http://tplogin.cn/
密码输入1234567890
找到lan口设置,这里我设置的IP地址是192.168.20.1,然后设备连接后的IP地址的网段也是在192.168.20.*下。
这样我们便可以进行网段的修改。
可以查看分配的IP地址。
二,有线设置方法
说明:下面我的演示采用的网段是192.168.1.,但是由于移动平台本身的IP是在192.168.20.,所以这里建立大家把IP地址设置成在192.168.20.,这样可以保证在一个网段下可以控制两个设备。
1-1,连接
首先利用网线,将机械臂与笔记本电脑进行连接。
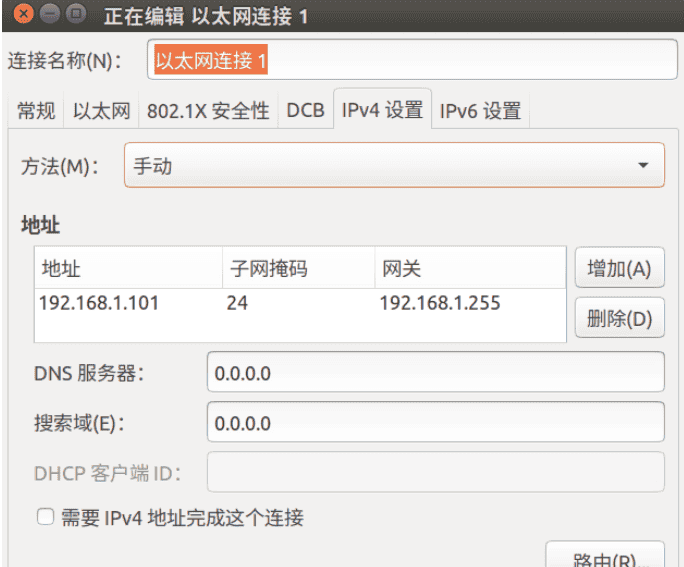
首先明确笔记本电脑端的IP地址和示教器端的IP地址在同一个网段,但是不同的IP下。
设置成
笔记本:
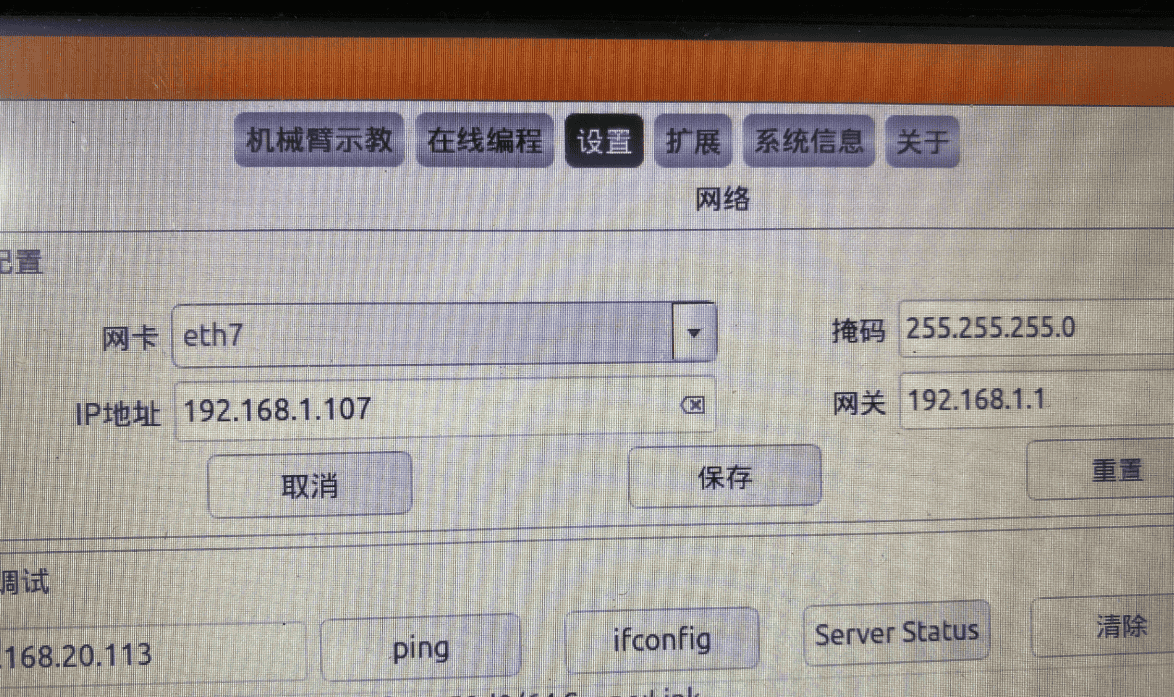
示教器端设置成:
网卡选择eth× 名称的。
示教器端设置完成后,重启一下。
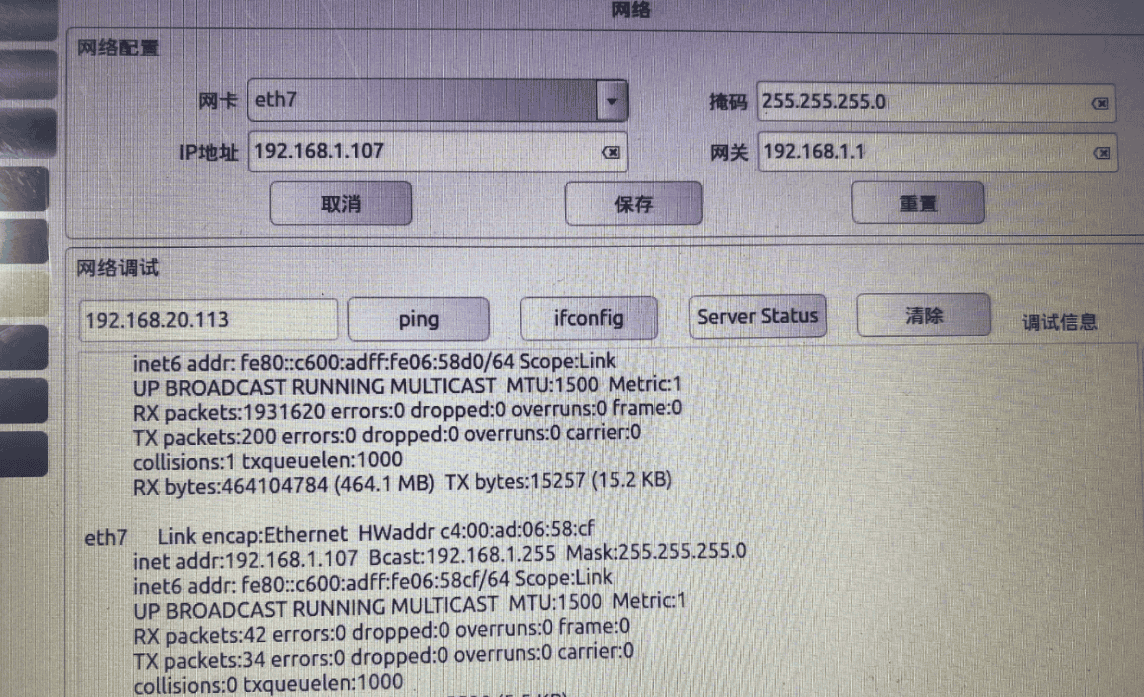
1-2,查看
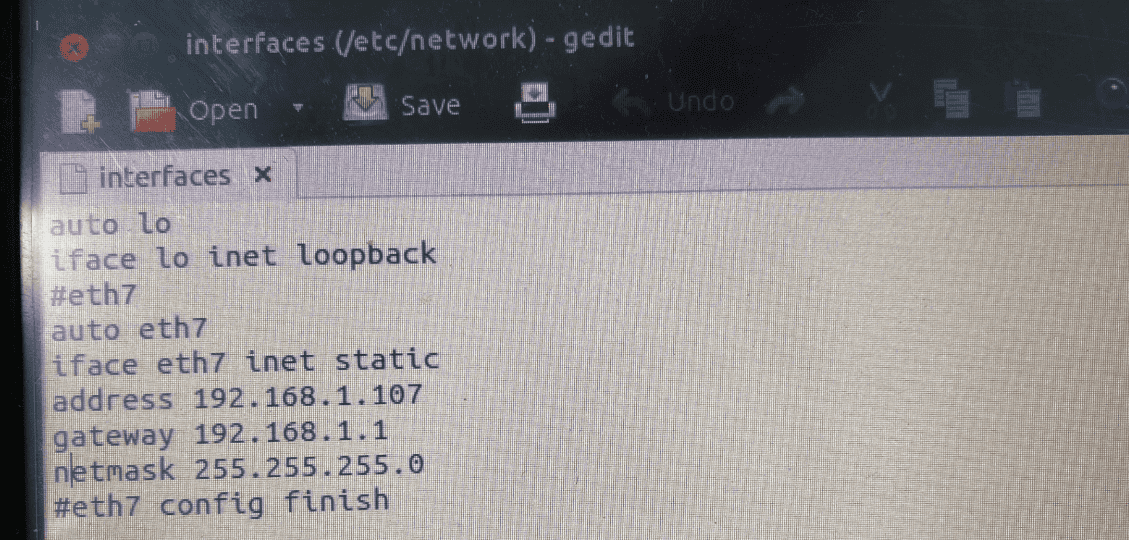
在aubo的ubuntu端可以查看设置的结果,在/etc/network/interfaces文件下,
进入示教器端,点击ifconfig查看设置是否成功,如果出现我们设置的eth×网络提示,说明设置成功。
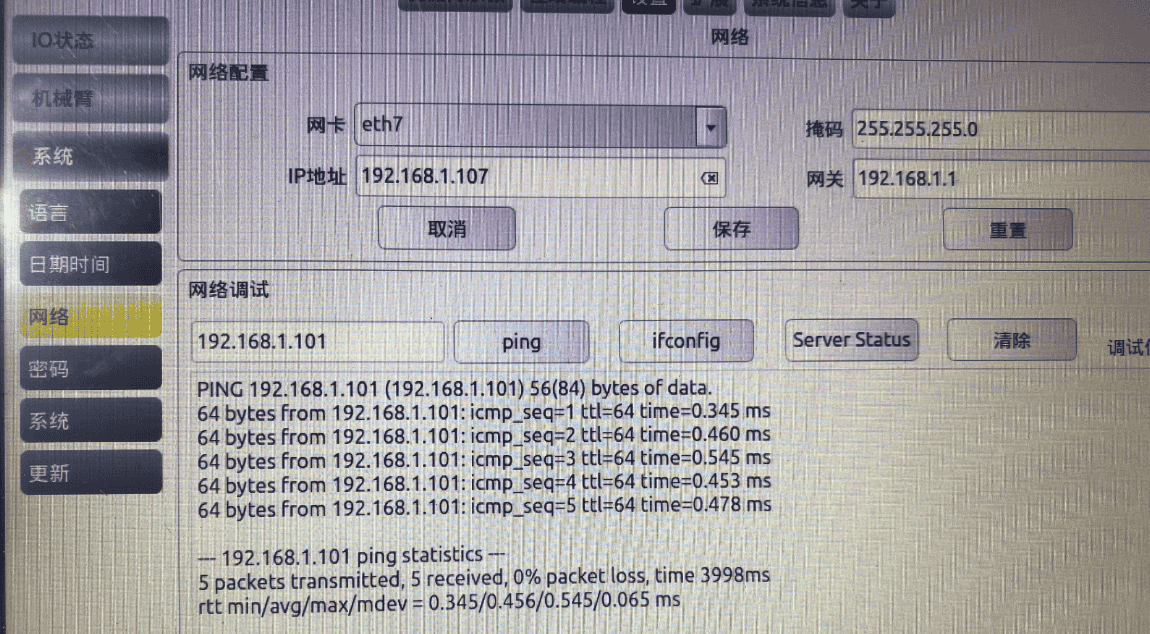
1-3,测试
然后在电脑端和示教器端分别ping一下对方,如果能够ping通,说明连接已经建立。

1-4,验证
验证方式同无线设置一样。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...